BlueBot
Úvod
BlueBot se dočkal reinkarnace, více na stránce BlueBot2 
Pro stavbu BlueBota jsem se rozhodl poté, co mi přestal stačit podvozek tanku ovládaného bluetoothem. Byl poměrně malý, takže se na něj nevešly potřebné senzory a baterie a měl nekvalitní konstrukci. BlueBot má oproti svému předchůdci asi jednou tak velký podvozek TANK-02 koupený na SnailInstruments.com, který je rozšířen o přídavnou desku T02AOD stejného výrobce a plexisklovou vrchní desku vyrobenou svépomocí.
Pozor, výrobce ke stavebnici podvozku nedodává žádný návod (kromě návodů ke stavbě pásových pojezdů od firmy Tamiya - pozor na spojování pásů ) - převodovku je nutné postavit ve variantě A nebo C kvůli polohy výstupní osičky.


Co to umí?
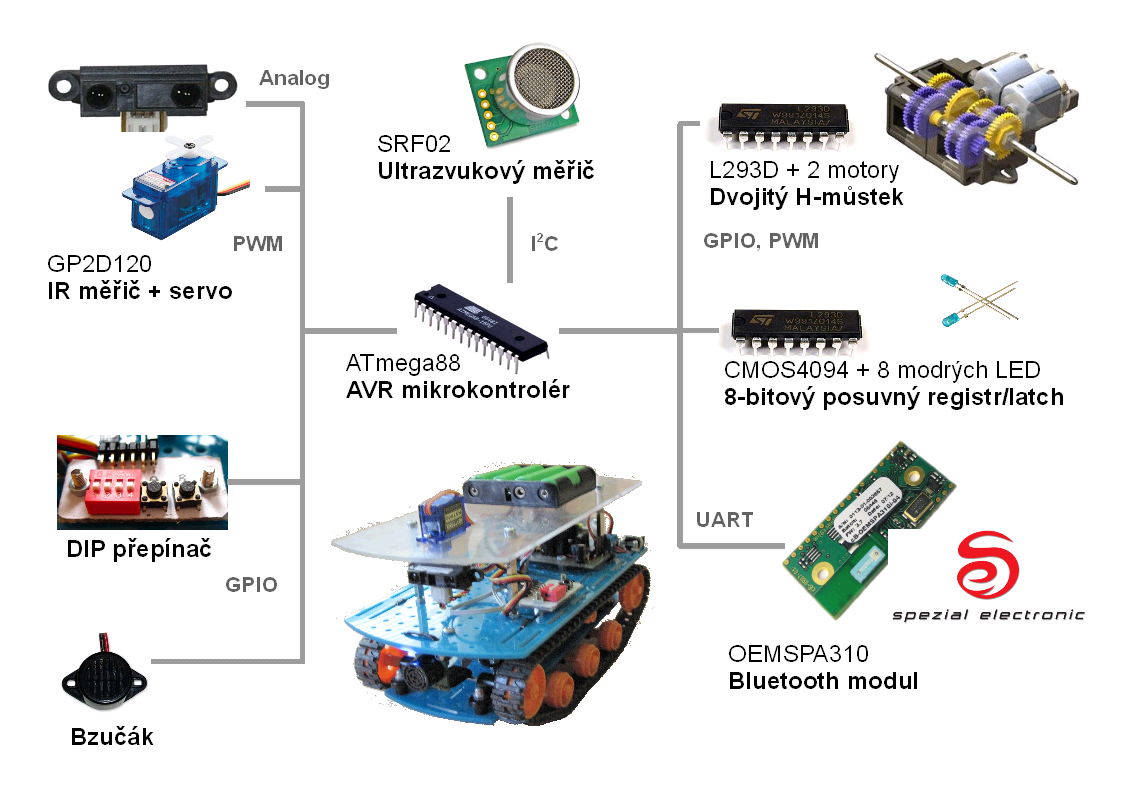
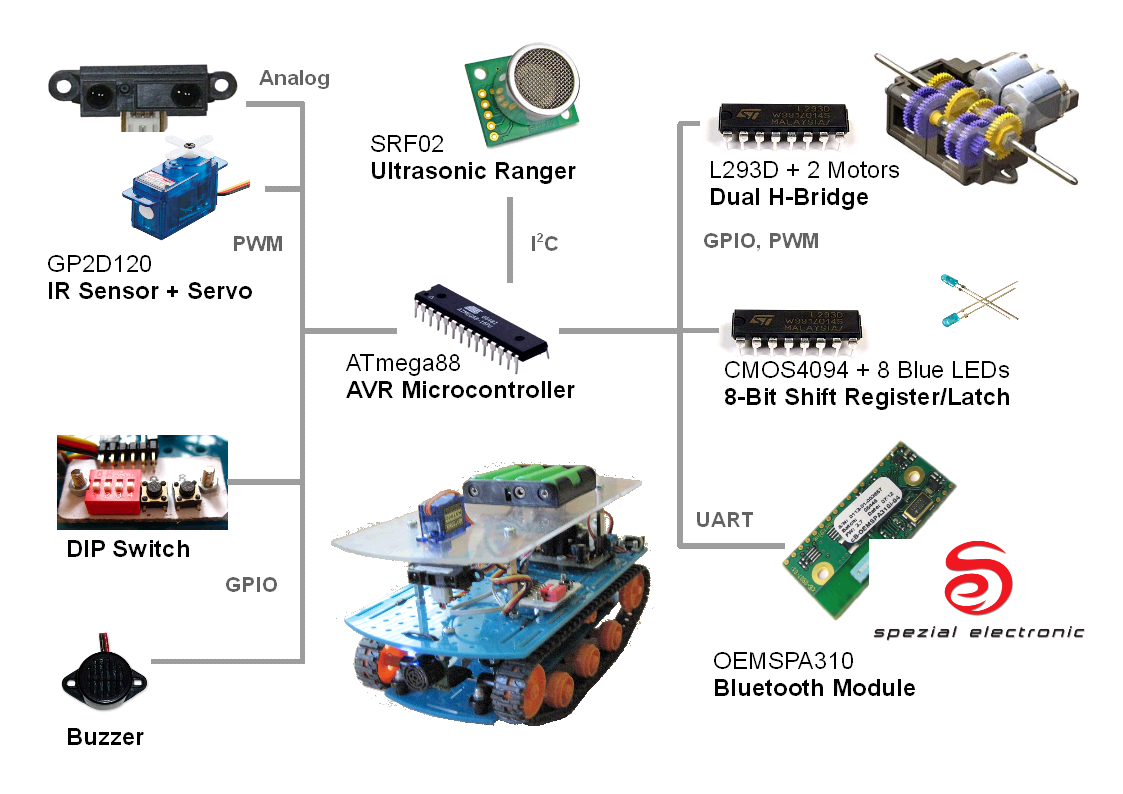
BlueBota je díky Bluetooth modulu OEMSPA310, darovaného firmou Spezial Electronic, možné bezdrátově programovat (v jednočipu je vypálen bootloader postavený na avr109 upravený tak, aby při programování nebylo nutné na robota sahat - původně byl aktivován tlačítkem), řídit či sledovat stav senzorů z Java aplikace pro PC nebo mobilní telefon s Bluetooth.

Aby BlueBot nebyl jen dalším tankem na dálkové ovládání, je doplněn infračerveným dálkoměrěm GP2D120, umožňujícím změřit vzdálenost k překážce v rozmězí 4-30 cm a ultrazvukovým dálkoměrěm SRF02 měřícím v rozsahu 15-600 cm. To robotovi umožňuje samostatně se vyhýbat překážkám či je objíždět.
Mozkem robota je mikrokontrolér ATmega88 programovaný v jazyce C, ke kterému je připojen dvojitý H-můstek L293D pro spínání dvou motorků. Volba programu probíhá nastavením DIP switche a pomocí dvou tlačítek. Deska je zatím použita z tanku. Navrhl jsem její novou verzi s několika vylepšeními a odděleným H-můstkem a čekám na její výrobu.

Aby se BlueBot líbil, je doplněn efektním bzučákem (dá se využít pro primitivní algoritmus odstraňování živých překážek ) a osmi silně svítícími modrými LED diodami umístěnými po obvodu, o jejichž spínání se stará osmibitový posvný registr/latch 4094. V jednočipu je nastaveno několik animací, které se mohou měnit například při změn směru jízdy. Za tmy vypadají například takto: http://www.youtube.com/watch?v=7nXp0yFp5Rc.
Blokové schéma
(English version here)
{kind=link}
Další fotografie


…a ještě více jich najdete na http://dir.adamh.cz/robot-bluebot/foto/
BlueBot si taky zajezdil na expozici Dotkni se robotiky! během Dnů vědy a techniky 2009 v Plzni a stály se na něj fronty

Video
Na videu robot předvádí primitivní algoritmus vyhýbání se překážkám (měří se IR dálkoměrem ve třech úhlech - při použití tří čidel by to bylo o dost plynulejší, ale taky dražší). Algoritmus je nyní upravený, ten na videu měl při detekci překážky na všech stranách tendenci cyklit se (případ s dveřmi ve druhé třetině videa). Chyba již byla odstraněna
Odkaz na YouTube: http://www.youtube.com/watch?v=kXTuBK3fFyE.
Odkazy
- Nová verze: BlueBot2
- Další fotografie: http://dir.adamh.cz/robot-bluebot/foto/
- Původní tank ovládaný bluetoothem: http://projects.adamh.cz/tank
- Firma Spezial Electronic (dodavatel bluetooth modulů ConnectBlue): http://www.spezial.cz
- Web věnovaný robotice: http://robotika.cz
- Článek na LetsMakeRobots.com: http://letsmakerobots.com/node/10757