Obsah
BlueBot2
Úvod
BlueBot2 je reinkarnací BlueBota. Oproti původní verzi se dočkal několika vylepšení - čtyři AA akumulátory byly nahrazeny 7,2 V Li-ion akumulátorem, Bleutooh modul OEMSPA310 byl umístěn na malou desku s konektorem a odporovým děličem, univerzální plošný spoj byl nahrazen novým plošným spojem s ATmega88 a dvojitým H-můstkem L293D. Vrchni plexisklovou desku jsem nahradil originální modrou deskou pro podvozek TANK-02 (po tom, co mi BlueBot sjel ze schodů a z jedné plexisklové desky vytvořil desky dvě).
Spolu s dalšími robotickými vozítky si zajezdil na Noci vědců 2010 v plzeňské Techmanii (tam prozměnu spadl ze stolu, takže ani nová deska nevydržela celistvá příliš dlouho  ).
).

Co to umí?
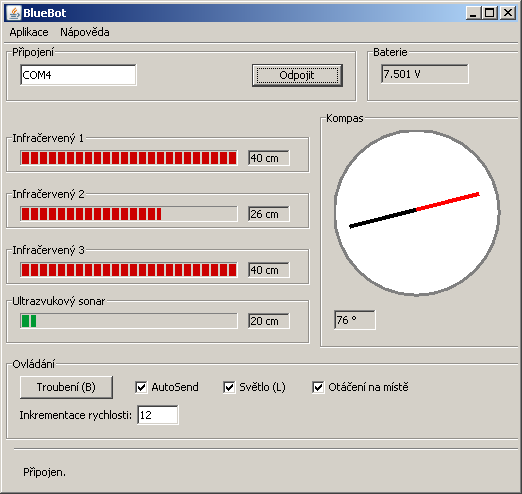
Robota můžeme ovládat z počítače či mobilního telefonu s Javou pomocí rozhraní Bluetooth. V autonomním režimu se díky třem infračerveným dálkoměrům GP2D120 umí vyhýbat překážkám a nenarazit do ní. Pokud je nějaká překážka tak malá, že ji senzory nevidí, robot ji prostě přejede - od toho je to tank
Rozhraní Bluetooth robot používá také k bezdrátového programování pomocí bootloaderu či ladění algoritmů.
Kromě toho robot dostal kompas CMPS03, který lze použít pro jízdu rovně, či ultrazvukový sonar SRF02 - ten momentálně jen jako další ukazatel v ovládací aplikaci, v autonomních algoritmech není použit. Pro parádu dostal robot bílou a modrou LED (modrá slouží k signalizaci činnosti Bluetooth modulu) a bzučák, který úžasně troubí.
Dálkové ovládání:
Fotografie




Odkazy
- Další fotky - http://dir.adamh.cz/robot-bluebot2
- Tank - první verze pásáku ovládaného Bluetoothem (návod ke stavbě)
- BlueBot - druhá verze tanku, přímý předchůdce BlueBota2